 |
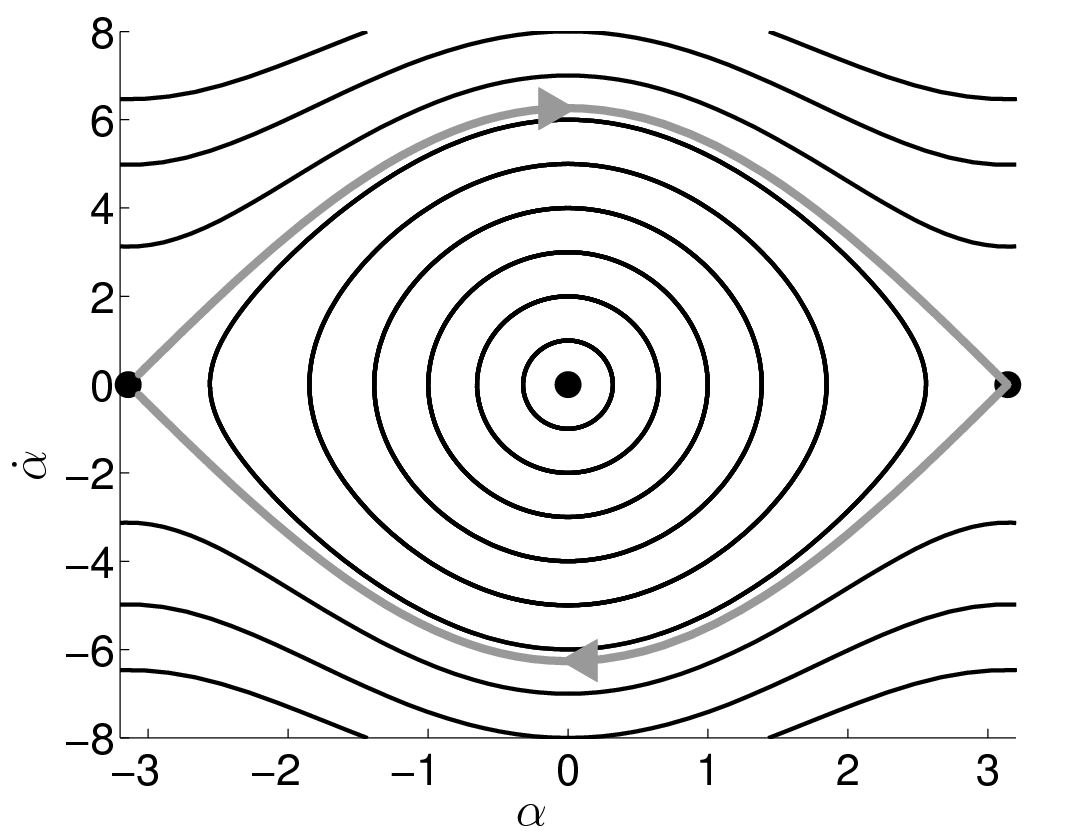
h=plot([-pi,0,pi],0,'k.'); set(h,'markersize',40); hold on;
pdl = inline('[x(2);-9.81*sin(x(1))]','t','x');
opt=odeset('RelTol',1e-5);
for x1=[-9 -8 -7 1 2 3 4 5 6 7 8 9],
[t,x]=ode45(pdl,[0 5],[0;x1],opt);
h=plot(x(:,1),x(:,2),'k-'); set(h,'linewidth',2);
[t,x]=ode45(pdl,[0 -5],[0;x1],opt);
h=plot(x(:,1),x(:,2),'k-'); set(h,'linewidth',2);
end
axis([-3.2 3.2 -8 8])
[t,x]=ode45(pdl,[0 -4],[3.14;0],opt);
h=plot(x(:,1),x(:,2),'-','Color',[0.6 0.6 0.6]); set(h,'linewidth',4);
[t,x]=ode45(pdl,[0 4],[3.14;0],opt);
h=plot(x(:,1),x(:,2),'-','Color',[0.6 0.6 0.6]); set(h,'linewidth',4);
|
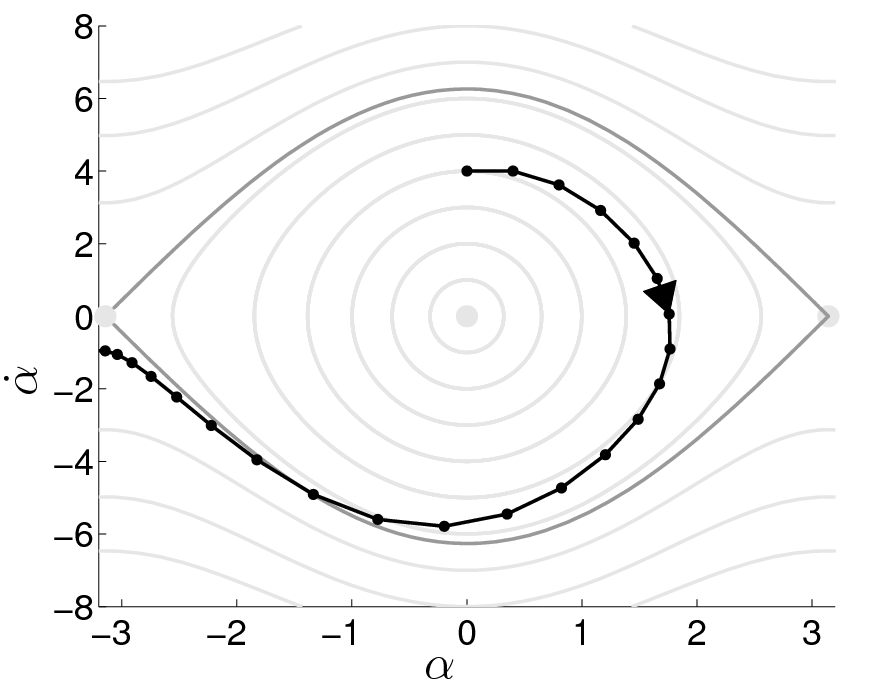 |
n = 30; tau = 0.1; x = zeros(2,n); x(:,1) = [0;4];
for i=1:n,
x(:,i+1) = x(:,i) + tau*feval(pdl,0,x(:,i));
end
h=plot(x(1,:),x(2,:),'k.-'); set(h,'linewidth',2,'markersize',20);
|
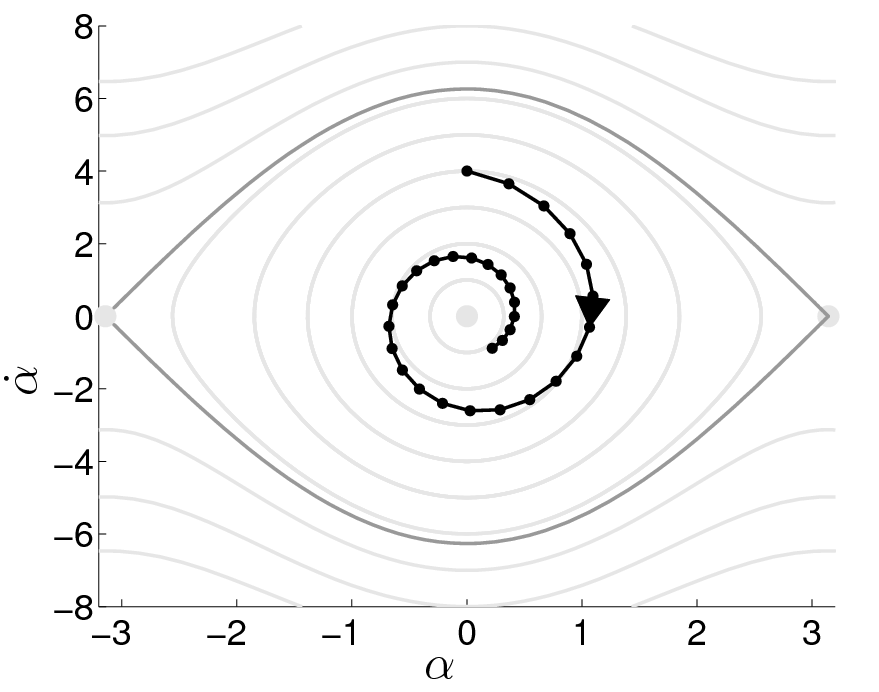 |
x0 = [0;4]; n = 30; tau = 0.1; x = zeros(2,n); x(:,1) = x0;
TOL = 1e-6; N_max = 20; d = size(x0,1); x(:,1) = x0;
for k = 1:n
x(:,k+1) = x(:,k);
for j = 1:N_max
% Newton step
F = x(:,k+1) - (x(:,k) + tau * feval(pdl,0,x(:,k+1)));
DF = eye(d) - tau * feval(dpdl,0,x(:,k+1));
dx = DF\F;
x(:,k+1) = x(:,k+1) - dx;
if (max(abs(dx)) < TOL) break; end;
end;
end;
h=plot(x(1,:),x(2,:),'k.-');
set(h,'linewidth',2,'markersize',20);
|
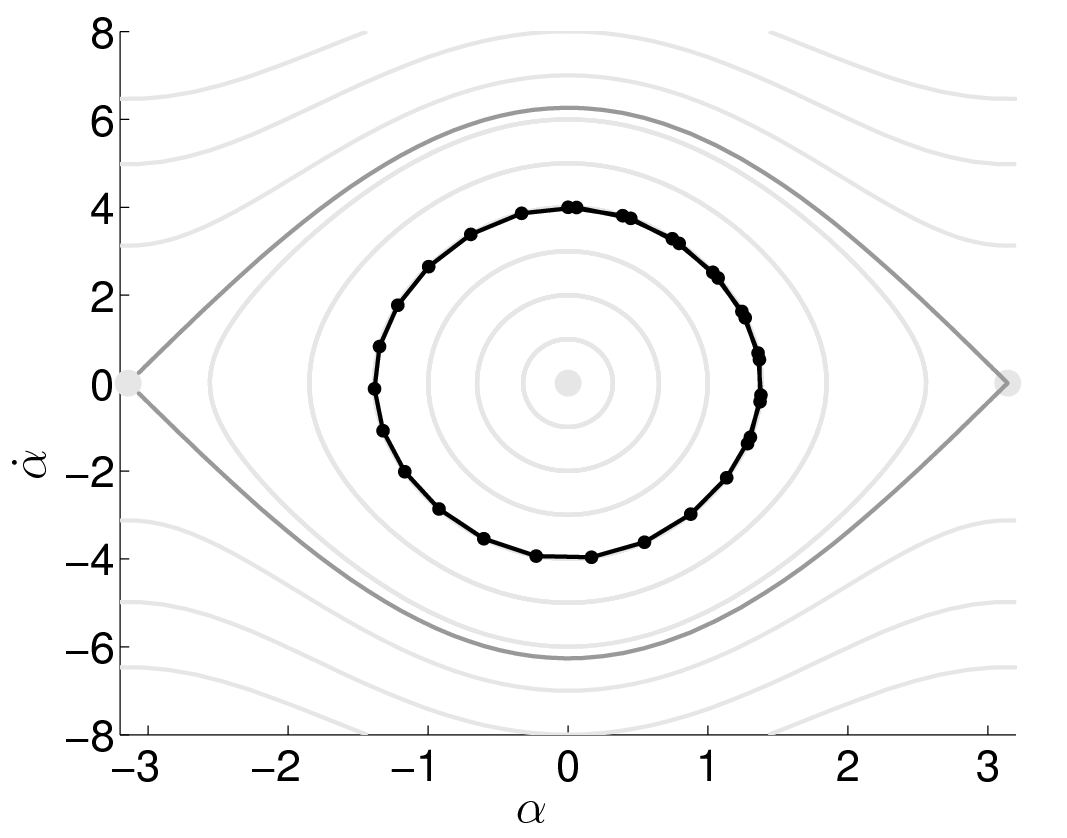 |
x0 = [0;4]; n = 30; tau = 0.1; x = zeros(2,n);
x(:,1) = x0; TOL = 1e-6; N_max = 20; d = size(x0,1);
for k = 1:n
x(:,k+1) = x(:,k);
for j = 1:N_max
% Newton step
F = x(:,k+1) - (x(:,k) + tau * feval(pdl,0,(x(:,k)+x(:,k+1))/2));
DF = eye(d) - tau * feval(dpdl,0,x(:,k+1));
dx = DF\F;
x(:,k+1) = x(:,k+1) - dx;
if (max(abs(dx)) < TOL) break; end;
end;
end;
h=plot(x(1,:),x(2,:),'k.-'); set(h,'linewidth',2,'markersize',20);
|