Industrie-Projekt „Model Predictive Control of Combined Cycle Power Plants“
Project Leader: Prof. Dr. Lars Grüne
Contact: Prof. Dr. Lars Grüne
Project start: 2016/10/01
Project team:
- Prof. Dr. Lars Grüne
- M.Sc. Matthias Höger
External partners:
Siemens AG, Divison Power and Gas, Erlangen
Support:
Siemens AG, Divison Power and Gas, Erlangen
Project description:
APPLICATION BACKGROUND
The Power and Gas Division of the Siemens AG offers products and solutions for operating fossil power plants. One specific task of this division is the design and implementation of controllers for combined cycle power plants such as gas fuelled plants. During the startup scenario the objective of the controller is to ensure that the plant produces its maximum power as soon as possible with respect to certain constraints. This is of particular importance in a grid which is increasingly powered by renewable energy sources, because gas power plants are the preferred backup solution for periods in which not enough renewable energy is available. The ability to start up gas power plants as fast as possible is crucial in order to provide the flexibility needed for this purpose. The central difficulty when starting up a power plant quickly lies in the heating of the components. For example, heating thick walled components too fast reduces their durability because of the high thermal stress.
CONTRIBUTION TO THE MISSION OF MODUS
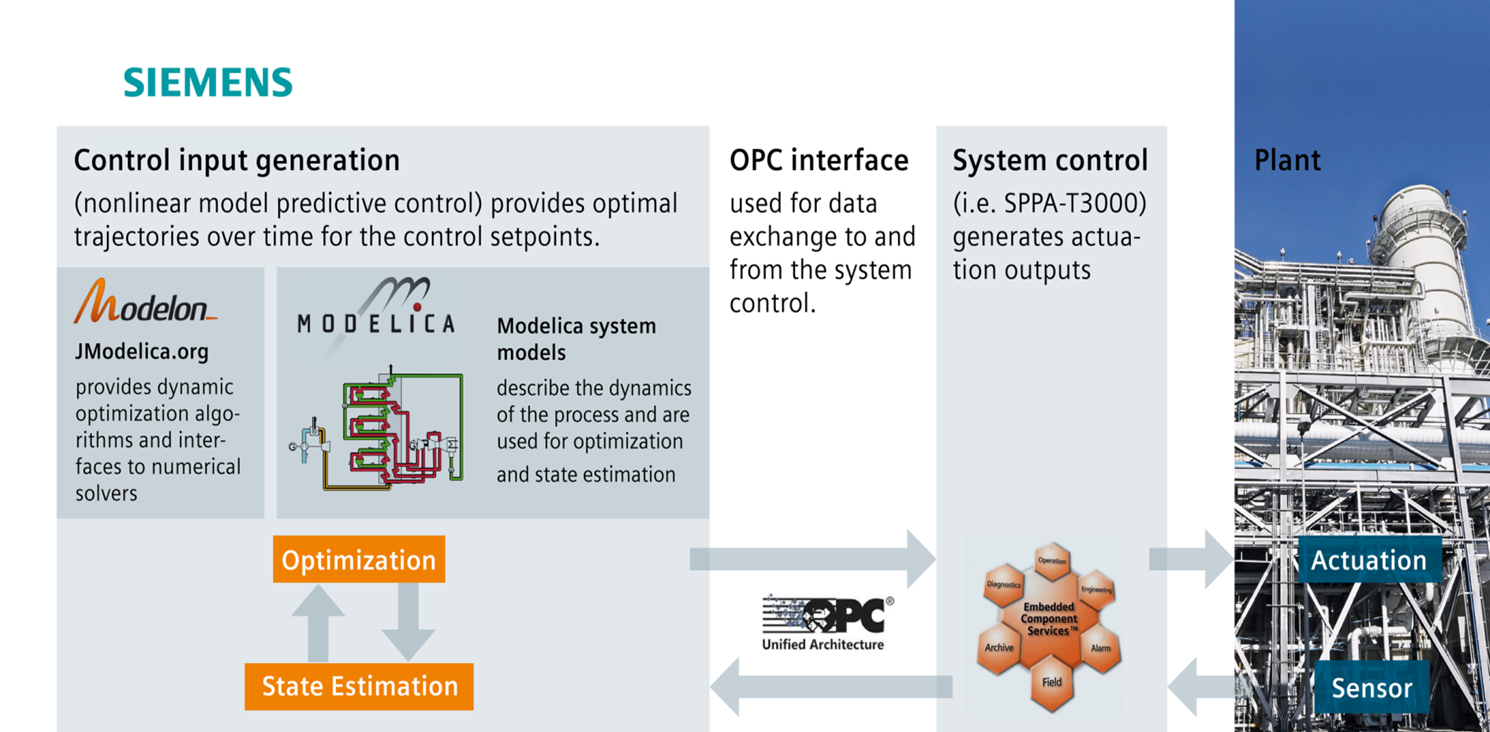
In most existing power plants, PID controllers are used for operating the plant. Since this type of controller contains no information about the future behaviour of the plant, it is expected that model predictive control (MPC) will be superior to the PID controller. For this reason, MPC controllers have already been developed at Siemens for regulation tasks in combined cycle power plants. Within this project, MPC controllers for the fast startup of these plants shall be designed, implemented and tested. Particularly, two kinds of controller structures will be investigated: on the one hand, an MPC controller which tracks an optimal startup trajectory that was pre-computed offline. On the other hand, an MPC controller where the underlying optimization directly includes the desired performance criteria, like fast startup and low thermal stress as control objectives. i.e., in which these performance criteria are optimized online. While the first allows to use more sophisticated models in the optimization because it is carried out offline, the second is more flexible at runtime, because it can also react to deviations from the pre-computed optimal trajectory. Which of these two advantages is more important for the present application is one of the core questions the project shall answer.